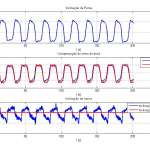
Resposta do controlador
Resposta do controlador
T_100_k_30
T_100_k_40
T_100_k_50

T_200_K_30

T_200_K_40
T_200_K_50
T_200_k_10
T_200_k_20
T_250_K_30
T_250_K_50
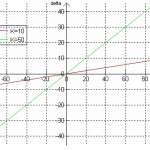
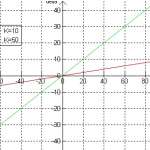
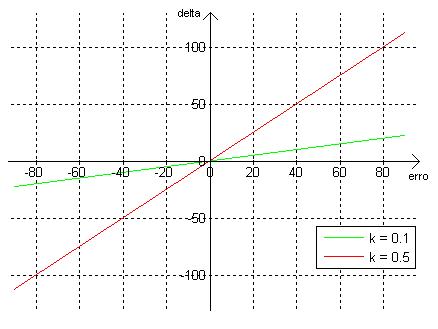
curva de ganho
curva de ganho

exp_cima_1
exp_cima_1
exp_cima_2
exp_cima_2
exp_cima_3
exp_cima_3
exp_cima_4
exp_cima_4

exp_frente_1
exp_frente_1

exp_frente_2
exp_frente_2

exp_frente_3
exp_frente_3
exp_frente_4
exp_frente_4
exp_lado_1
exp_lado_1
exp_lado_2
exp_lado_2
exp_lado_3
exp_lado_3
exp_lado_4
exp_lado_4

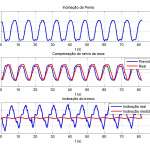
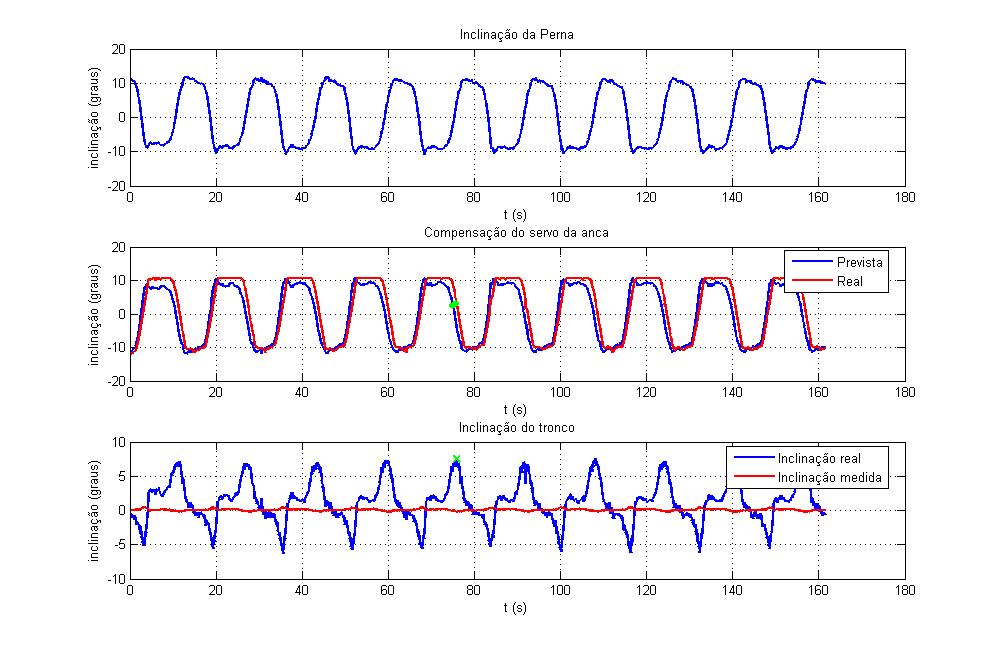
inclin_exp_square_T_100_K_50-30
inclin_exp_square_T_100_K_50-30

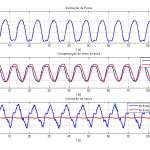
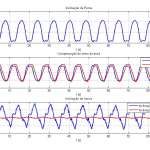
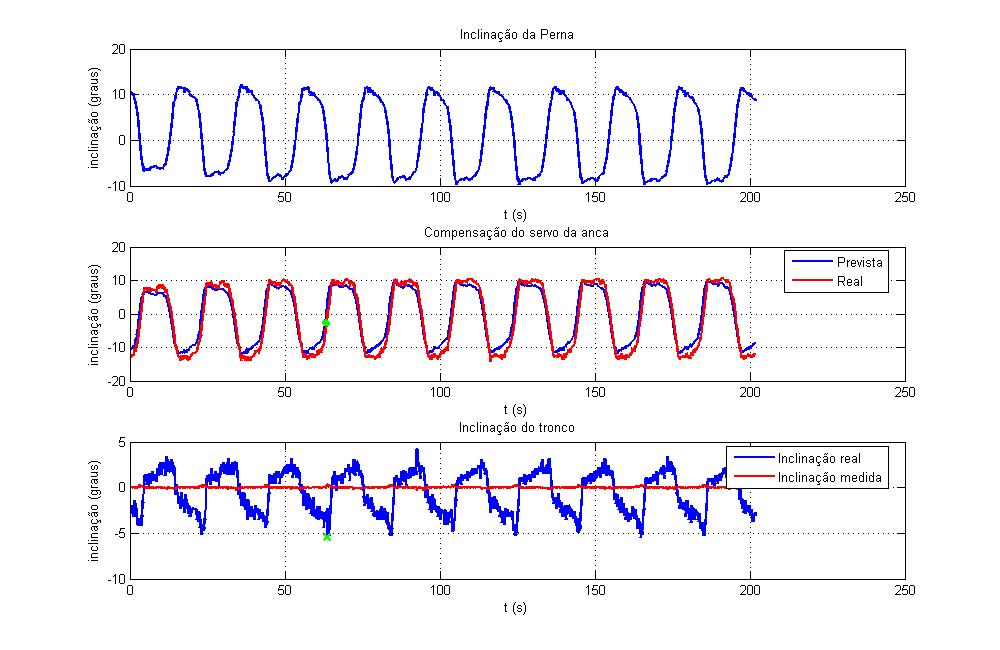
inclin_exp_square_traj_T_100_K_50-30
inclin_exp_square_traj_T_100_K_50-30

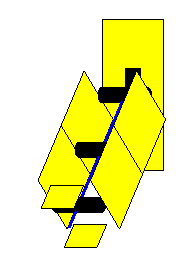
perna_numerada
perna_numerada
resposta do controlador
 Resposta do controlador
Resposta do controlador
 Resposta do controlador
Resposta do controlador
 T_100_k_30
T_100_k_30
 T_100_k_40
T_100_k_40
 T_100_k_50
T_100_k_50
 T_200_K_30
T_200_K_30
 T_200_K_40
T_200_K_40
 T_200_K_50
T_200_K_50
 T_200_k_10
T_200_k_10
 T_200_k_20
T_200_k_20
 T_250_K_30
T_250_K_30
 T_250_K_50
T_250_K_50
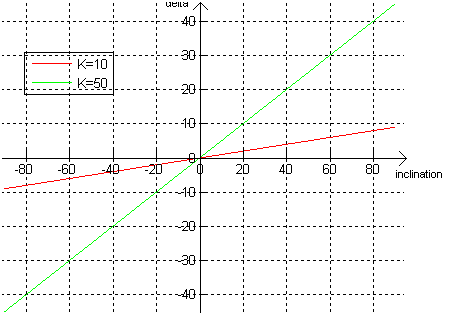
 curva de ganho
curva de ganho
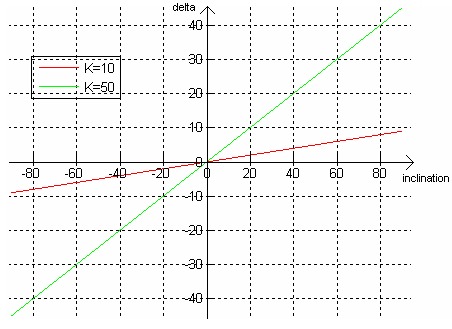 curva de ganho
curva de ganho
 exp_cima_1
exp_cima_1
 exp_cima_1
exp_cima_1
 exp_cima_2
exp_cima_2
 exp_cima_2
exp_cima_2
 exp_cima_3
exp_cima_3
 exp_cima_3
exp_cima_3
 exp_cima_4
exp_cima_4
 exp_cima_4
exp_cima_4
 exp_frente_1
exp_frente_1
 exp_frente_1
exp_frente_1
 exp_frente_2
exp_frente_2
 exp_frente_2
exp_frente_2
 exp_frente_3
exp_frente_3
 exp_frente_3
exp_frente_3
 exp_frente_4
exp_frente_4
 exp_frente_4
exp_frente_4
 exp_lado_1
exp_lado_1
 exp_lado_1
exp_lado_1
 exp_lado_2
exp_lado_2
 exp_lado_2
exp_lado_2
 exp_lado_3
exp_lado_3
 exp_lado_3
exp_lado_3
 exp_lado_4
exp_lado_4
 exp_lado_4
exp_lado_4
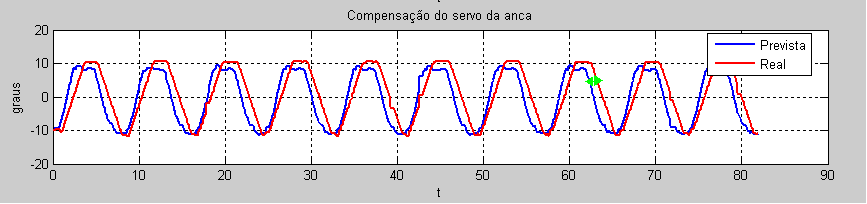 inclin_exp_square_T_100_K_50-30
inclin_exp_square_T_100_K_50-30
 inclin_exp_square_T_100_K_50-30
inclin_exp_square_T_100_K_50-30
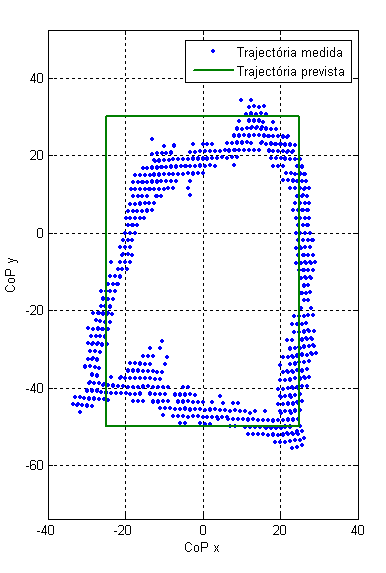 inclin_exp_square_traj_T_100_K_50-30
inclin_exp_square_traj_T_100_K_50-30
 inclin_exp_square_traj_T_100_K_50-30
inclin_exp_square_traj_T_100_K_50-30
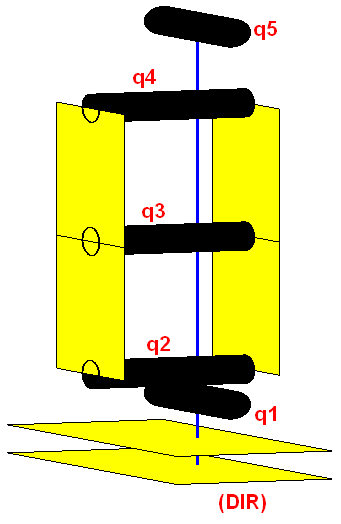 perna_numerada
perna_numerada
 perna_numerada
perna_numerada
 resposta do controlador
resposta do controlador